Python/C VI — ROS 2 Bindings
- Section 10: ROS 2 Python Message Bindings
- Overview
- 10.1 Colcon build: Python version on Jazzy
- 10.2 Three-layer binding architecture
- 10.3 Generated extension wrapper: five-section source structure
- Section 1: Python module definition
- Section 2: C includes and helper functions
- Section 3: External imports (symbols resolved by linker)
- Section 4: Registration function (creates and registers capsules)
- Section 5: PyInit entry point (Python import hook)
- How different bindings get different typesupport
- 10.4 Import flow when Python loads the typesupport module
- 10.5 Typesupport dispatcher architecture
- 10.6 Two bindings cooperating:
demo_pkg+rclpy - 10.7 Runnable verification
- 10.8 Jazzy artifact reference
This article is Part VI of the Python C extension series. Part I — Overview introduced PyCapsule as an opaque handle for C pointers (§2.1). Parts II–V covered execution models, ctypes, and handle pools. Part VII — pybind11 covers compile-time C++ bindings and contrasts them with ctypes. Part VIII — Extensions vs Bindings classifies this stack as a hybrid binding system. Here we apply the capsule pattern at production scale: how ROS 2 Jazzy generates Python message bindings, the typesupport dispatcher pattern, and how rclpy interacts with message typesupport at publish time — including _rclpy_pybind11 as a real pybind11 module (see Part VII §11.1).
All paths, filenames, and CMake behavior below come from building ros2_binding_demo on ROS 2 Jazzy (Ubuntu 24.04 Noble, Python 3.12, aarch64).
For the C-side typesupport dispatcher, see Type Erasure IV — ROS 2 Messages. Part VI walks the Python-specific layers in full detail.
Runnable demo: ros2_binding_demo in the python repository.
source /opt/ros/jazzy/setup.zsh
cd ros2_binding_demo
colcon build --cmake-args \
-DPython3_EXECUTABLE=$(which python3) \
-DPYTHON_EXECUTABLE=$(which python3)
source install/setup.zsh
python3 verify_bindings.py
| Section | Demo folder |
|---|---|
| §10.1–10.8 | ros2_binding_demo — src/demo_pkg/, verify_bindings.py |
Section 10: ROS 2 Python Message Bindings
Overview
ROS 2 Jazzy uses a layered architecture for Python bindings, separating pure Python classes, C conversion functions, and typesupport implementations. This section covers the binding architecture, the dispatcher pattern, and how rclpy interacts with message typesupport — using artifacts from a real colcon build of demo_pkg.
All examples use demo_pkg/msg/DemoStatus from the demo workspace — the same package as Type Erasure IV — ROS 2 Messages.
10.1 Colcon build: Python version on Jazzy
On Jazzy, rosidl_generator_py builds Python bindings through CMake FindPython3 (python3_add_library, PYTHON_INSTALL_DIR under lib/python3.12/site-packages). Pass both cmake hints to the interpreter you will run after source install/setup.*:
colcon build --cmake-args \
-DPython3_EXECUTABLE=$(which python3) \
-DPYTHON_EXECUTABLE=$(which python3)
Reminder — two variables, two roles (especially on older ROS 2 such as Humble):
Python3_EXECUTABLEpicks the install path (lib/python3.X/site-packages);PYTHON_EXECUTABLEpicks the extension ABI (headers, linker flags, and on older distros thecpython-*filename suffix). On Jazzy both should still be set to the same binary. If only one is set, install path and extension build can diverge:
Configuration Install path Extension ABI / filename Result -DPython3_EXECUTABLE=/usr/bin/python3.11onlypython3.11/site-packagesBuilt against default python3.10→cpython-310-*.soMismatch -DPYTHON_EXECUTABLE=/usr/bin/python3.11onlyDefault python3.10/site-packagescpython-311-*.soMismatch Both set to the same interpreter Consistent Consistent Correct
After source install/setup.zsh:
python3 --version
# Python 3.12.3
python3 -c "import sysconfig; print(sysconfig.get_config_var('SOABI'))"
# cpython-312-aarch64-linux-gnu
How Jazzy names the built artifacts
python3_add_library builds Layer-3 typesupport wrappers. On our Jazzy build it emits plain .so names (no cpython-* tag in the filename):
set(_target_name "${PROJECT_NAME}_s__${_typesupport_impl}")
python3_add_library(${_target_name} MODULE
${_generated_extension_${_typesupport_impl}_files})
Installed result:
install/demo_pkg/lib/python3.12/site-packages/demo_pkg/
demo_pkg_s__rosidl_typesupport_c.so
Python still imports this as demo_pkg.demo_pkg_s__rosidl_typesupport_c. The internal PyModuleDef name created at runtime is _demo_pkg_support — that string is not the import path.
By contrast, rclpy’s pybind11 module does carry the SOABI tag on Jazzy:
/opt/ros/jazzy/lib/python3.12/site-packages/rclpy/
_rclpy_pybind11.cpython-312-aarch64-linux-gnu.so
rosidl_generator_py and rclpy therefore use different extension naming conventions on the same distribution. Version isolation for message bindings relies on installing into lib/python3.12/site-packages/ rather than on a cpython-* filename suffix.
10.2 Three-layer binding architecture
ROS 2 Python message bindings split into three layers.
Layer 1: Pure Python class
File: demo_pkg/msg/_demo_status.py
Purpose:
- Provides Python class definition (
DemoStatus):__repr__, basic operations - Metaclass defines
__import_type_support__()method
Capabilities:
- Works without the Layer-3
.so(pure Python fallback) - Can create instances and access fields
Limitations:
- Cannot serialize/deserialize to wire format until
__import_type_support__()loads capsules from Layer 3 rclpypublish/subscribe paths callcheck_for_type_support, which triggers import automatically
from demo_pkg.msg import DemoStatus
msg = DemoStatus(name="x", code=1, active=True)
assert DemoStatus.__class__._TYPE_SUPPORT is None # capsules not loaded yet
Layer 2: C conversion library
File: libdemo_pkg__rosidl_generator_py.so
Characteristics:
- Pure C shared library (no
cpython-*suffix) - Not a Python extension — not loaded by
importdirectly - Loaded by the Layer-3 Python extension wrapper via ELF
DT_NEEDED
Functions:
demo_pkg__msg__demo_status__convert_from_py— PythonDemoStatus→ C structdemo_pkg__msg__demo_status__convert_to_py— C struct → PythonDemoStatus
Dependencies:
- Uses
Python.h(PyObject *parameters) - Must be compiled for the matching Python version
Layer 3: Python extension wrapper
Three identical wrappers generated:
| Source (build tree) | Installed under site-packages/demo_pkg/ |
Imported at runtime? |
|---|---|---|
_demo_pkg_s.ep.rosidl_typesupport_c.c |
demo_pkg_s__rosidl_typesupport_c.so |
Yes |
_demo_pkg_s.ep.rosidl_typesupport_fastrtps_c.c |
demo_pkg_s__rosidl_typesupport_fastrtps_c.so |
No |
_demo_pkg_s.ep.rosidl_typesupport_introspection_c.c |
demo_pkg_s__rosidl_typesupport_introspection_c.so |
No |
import_type_support('demo_pkg') loads only the first file. The import path is demo_pkg.demo_pkg_s__rosidl_typesupport_c; the on-disk name has no cpython-* suffix on Jazzy.
Characteristics:
- Source code is identical (only
PyInit_*function name differs) - All three compiled from the same empy template
- Each links to a different C typesupport library at compile time (plus the dispatcher — see §10.6)
- Only the
typesupport_cbinding is imported by Python; the others are build artifacts
Why three wrappers?
- Build system generates all three from the same template
- Each links to a different C library → linker resolves
ROSIDL_GET_MSG_TYPE_SUPPORTto different symbols at link time - Python only needs
typesupport_c(dispatcher) because the dispatcher handles runtime loading of FastDDS and introspection libraries - fastrtps/introspection wrappers exist but are never imported by
import_type_support
Registered capsules (same pattern in all three):
| Capsule attribute | Contents |
|---|---|
create_ros_message_msg__msg__demo_status |
PyCapsule wrapping function pointer to create C struct |
destroy_ros_message_msg__msg__demo_status |
PyCapsule wrapping function pointer to destroy C struct |
convert_from_py_msg__msg__demo_status |
PyCapsule wrapping Python → C conversion function pointer |
convert_to_py_msg__msg__demo_status |
PyCapsule wrapping C → Python conversion function pointer |
type_support_msg__msg__demo_status |
PyCapsule wrapping typesupport struct pointer (dispatcher for typesupport_c; FastDDS or introspection for the other two wrappers) |
Install tree after colcon build on Jazzy (demo_pkg):
install/demo_pkg/lib/
libdemo_pkg__rosidl_generator_py.so # Layer 2 — C conversion
libdemo_pkg__rosidl_typesupport_c.so # dispatcher
libdemo_pkg__rosidl_typesupport_fastrtps_c.so
libdemo_pkg__rosidl_typesupport_introspection_c.so
libdemo_pkg__rosidl_typesupport_cpp.so # C++ track (not used by Python)
libdemo_pkg__rosidl_typesupport_fastrtps_cpp.so
libdemo_pkg__rosidl_typesupport_introspection_cpp.so
libdemo_pkg__rosidl_generator_c.so
install/demo_pkg/lib/python3.12/site-packages/demo_pkg/
demo_pkg_s__rosidl_typesupport_c.so # Layer 3 — imported by Python
demo_pkg_s__rosidl_typesupport_fastrtps_c.so # build artifact
demo_pkg_s__rosidl_typesupport_introspection_c.so
msg/_demo_status.py # Layer 1
10.3 Generated extension wrapper: five-section source structure
The C source for the dispatcher binding is at build/demo_pkg/rosidl_generator_py/demo_pkg/_demo_pkg_s.ep.rosidl_typesupport_c.c. It has five logical sections.
Section 1: Python module definition
The code first defines a Python module structure using the Python C API:
PyMethodDef demo_pkg__methods[]— module methods (empty array; no callable methods)PyModuleDef demo_pkg__module— module structure with:- Module name:
"_demo_pkg_support"(internal name seen byPyModule_Create) - Doc string:
"_demo_pkg_doc" - State:
-1(module keeps state in global variables) - Methods: empty array
- Module name:
This structure is used by PyModule_Create() to create the Python module object.
static PyMethodDef demo_pkg__methods[] = {
{NULL, NULL, 0, NULL} /* sentinel */
};
static struct PyModuleDef demo_pkg__module = {
PyModuleDef_HEAD_INIT,
"_demo_pkg_support",
"_demo_pkg_doc",
-1,
demo_pkg__methods,
NULL, NULL, NULL, NULL,
};
Section 2: C includes and helper functions
The code includes ROS 2 C headers and defines wrapper functions:
rosidl_runtime_c/message_type_support_struct.h— definesrosidl_message_type_support_tdemo_pkg/msg/detail/demo_status__struct.h— C struct definition forDemoStatusdemo_pkg/msg/detail/demo_status__functions.h— create/destroy functions
Helper wrapper functions:
static void * demo_pkg__msg__demo_status__create_ros_message(void)
{
return demo_pkg__msg__DemoStatus__create();
}
static void demo_pkg__msg__demo_status__destroy_ros_message(void * raw_ros_message)
{
demo_pkg__msg__DemoStatus * ros_message = (demo_pkg__msg__DemoStatus *)raw_ros_message;
demo_pkg__msg__DemoStatus__destroy(ros_message);
}
Why wrapper functions are needed:
- ROS 2 C functions have specific signatures (
DemoStatus__create()returns a typed pointer) - Wrappers match the signature expected by
rclpy(returnsvoid *, takesvoid *) - These wrappers are wrapped in
PyCapsuleobjects later
Section 3: External imports (symbols resolved by linker)
The code declares external functions — not defined in this file; resolved by the linker:
ROSIDL_GENERATOR_C_IMPORT
bool demo_pkg__msg__demo_status__convert_from_py(PyObject * _pymsg, void * ros_message);
ROSIDL_GENERATOR_C_IMPORT
PyObject * demo_pkg__msg__demo_status__convert_to_py(void * raw_ros_message);
ROSIDL_GENERATOR_C_IMPORT
const rosidl_message_type_support_t *
ROSIDL_GET_MSG_TYPE_SUPPORT(demo_pkg, msg, DemoStatus);
| Symbol | Imported from |
|---|---|
demo_pkg__msg__demo_status__convert_from_py |
libdemo_pkg__rosidl_generator_py.so |
demo_pkg__msg__demo_status__convert_to_py |
libdemo_pkg__rosidl_generator_py.so |
ROSIDL_GET_MSG_TYPE_SUPPORT(demo_pkg, msg, DemoStatus) |
libdemo_pkg__rosidl_typesupport_*.so (which one depends on link target) |
Key insight: The linker resolves ROSIDL_GET_MSG_TYPE_SUPPORT to different functions depending on which C library is linked:
| Binding source | Primary typesupport link | ROSIDL_GET_MSG_TYPE_SUPPORT resolves to |
|---|---|---|
_demo_pkg_s.ep.rosidl_typesupport_c.c |
libdemo_pkg__rosidl_typesupport_c.so |
Dispatcher typesupport |
_demo_pkg_s.ep.rosidl_typesupport_fastrtps_c.c |
libdemo_pkg__rosidl_typesupport_fastrtps_c.so |
FastDDS serialization typesupport |
_demo_pkg_s.ep.rosidl_typesupport_introspection_c.c |
libdemo_pkg__rosidl_typesupport_introspection_c.so |
Introspection typesupport |
On Jazzy, all three wrappers also link libdemo_pkg__rosidl_typesupport_c.so (dispatcher) in addition to their specific typesupport library.
Section 4: Registration function (creates and registers capsules)
_register_msg_type__msg__demo_status(PyObject * pymodule) creates five PyCapsule objects.
For each capsule, the pattern is:
- Create capsule with
PyCapsule_New((void *)pointer, NULL, NULL) - Add to module with
PyModule_AddObject(pymodule, "attribute_name", pyobject) - Error handling: if
PyCapsule_NeworPyModule_AddObjectfails, cleanup and return error
| Capsule name on module | Wraps | Source |
|---|---|---|
create_ros_message_msg__msg__demo_status |
&demo_pkg__msg__demo_status__create_ros_message |
Local wrapper function |
destroy_ros_message_msg__msg__demo_status |
&demo_pkg__msg__demo_status__destroy_ros_message |
Local wrapper function |
convert_from_py_msg__msg__demo_status |
&demo_pkg__msg__demo_status__convert_from_py |
libdemo_pkg__rosidl_generator_py.so |
convert_to_py_msg__msg__demo_status |
&demo_pkg__msg__demo_status__convert_to_py |
libdemo_pkg__rosidl_generator_py.so |
type_support_msg__msg__demo_status |
ROSIDL_GET_MSG_TYPE_SUPPORT(...) pointer |
Linked typesupport library |
After registration, Python can access:
module.create_ros_message_msg__msg__demo_status # PyCapsule
module.destroy_ros_message_msg__msg__demo_status # PyCapsule
module.convert_from_py_msg__msg__demo_status # PyCapsule
module.convert_to_py_msg__msg__demo_status # PyCapsule
module.type_support_msg__msg__demo_status # PyCapsule
Section 5: PyInit entry point (Python import hook)
PyInit_demo_pkg_s__rosidl_typesupport_c(void) — entry point Python calls on import:
PyMODINIT_FUNC— macro marking this as a Python module initialization functionPyModule_Create(&demo_pkg__module)— creates module object from module definition_register_msg_type__msg__demo_status(pymodule)— registers capsules for each messagereturn pymodule— returns module to Python
The only difference between the three binding source files is this function name:
PyInit_demo_pkg_s__rosidl_typesupport_c(void)PyInit_demo_pkg_s__rosidl_typesupport_fastrtps_c(void)PyInit_demo_pkg_s__rosidl_typesupport_introspection_c(void)
How different bindings get different typesupport
The key is the ROSIDL_GET_MSG_TYPE_SUPPORT macro:
- The C compiler sees this macro and creates an undefined symbol reference
- The symbol is not defined in the extension source file
- The linker must find it in linked libraries
At compile time, CMake links each binding to different C libraries:
foreach(_typesupport_impl ${_typesupport_impls})
set(_target_name "${PROJECT_NAME}_s__${_typesupport_impl}")
python3_add_library(${_target_name} MODULE
${_generated_extension_${_typesupport_impl}_files})
target_link_libraries(${_target_name} PRIVATE
${_target_name_lib} # lib*_rosidl_generator_py.so
${rosidl_generate_interfaces_TARGET}__${_typesupport_impl} # specific typesupport
${c_typesupport_target} # dispatcher
...
)
endforeach()
Result: same source code, three compilations, each .so embeds a different typesupport pointer in the type_support_* capsule at link time.
10.4 Import flow when Python loads the typesupport module
- Python finds
install/demo_pkg/lib/python3.12/site-packages/demo_pkg/demo_pkg_s__rosidl_typesupport_c.so- Import machinery resolves the logical name
demo_pkg.demo_pkg_s__rosidl_typesupport_cto this file (plain.sosuffix is valid on Python 3.12) dlopenloads the shared library
- Import machinery resolves the logical name
- Python finds
PyInit_demo_pkg_s__rosidl_typesupport_csymbol- This is the entry point defined in Section 5
- Python calls
PyInit_demo_pkg_s__rosidl_typesupport_c()- Creates module object via
PyModule_Create - Calls
_register_msg_type__msg__demo_status(and other messages in the package) - Creates five
PyCapsuleobjects per message - Adds them as module attributes
- Returns module object
- Creates module object via
-
Python stores module with capsule attributes (all
PyCapsule) - Message metaclass stores capsules from module (when
__import_type_support__()runs):
DemoStatus.__class__._CREATE_ROS_MESSAGE = module.create_ros_message_msg__msg__demo_status
DemoStatus.__class__._CONVERT_FROM_PY = module.convert_from_py_msg__msg__demo_status
DemoStatus.__class__._CONVERT_TO_PY = module.convert_to_py_msg__msg__demo_status
DemoStatus.__class__._TYPE_SUPPORT = module.type_support_msg__msg__demo_status
DemoStatus.__class__._DESTROY_ROS_MESSAGE = module.destroy_ros_message_msg__msg__demo_status
rclpyuses capsules when publishing:- Gets capsules from
DemoStatus.__class__ - Unwraps
PyCapsuleobjects to get C function pointers - Calls C functions to convert and publish
- Gets capsules from
Why this generated code is simple:
- No actual conversion logic — all conversion done by external functions in
libdemo_pkg__rosidl_generator_py.so - No serialization logic — all serialization done by typesupport library (loaded dynamically by dispatcher)
- Just a wrapper — wraps existing C pointers in
PyCapsuleand exposes them to Python - One template, three outputs — same code compiled three times, linked to different C libraries
Generated but unused bindings
The build system also generates Python bindings for fastrtps and introspection:
demo_pkg_s__rosidl_typesupport_fastrtps_c.so— not used at runtimedemo_pkg_s__rosidl_typesupport_introspection_c.so— not used at runtime
These are build artifacts, not runtime dependencies. Python only imports the typesupport_c binding; the dispatcher handles runtime loading of the others.
10.5 Typesupport dispatcher architecture
Dispatcher pattern overview
libdemo_pkg__rosidl_typesupport_c.so is a dispatcher, not a serializer. It dynamically loads fastrtps or introspection C libraries at runtime based on the RMW implementation.
Dispatcher function:
rosidl_typesupport_c__get_message_typesupport_handle_function- Takes: handle, identifier
- If identifier matches: return handle directly
- If different: load from shared library dynamically
How it works:
- Check if requested typesupport identifier matches current
- If different, use
rcpputils::SharedLibraryto load the appropriate.so - Look up the typesupport function symbol in the loaded library
- Return the appropriate
rosidl_message_type_support_t *
Generated dispatcher code for DemoStatus (build/demo_pkg/rosidl_typesupport_c/.../demo_status__type_support.cpp):
static const type_support_map_t _DemoStatus_message_typesupport_map = {
2,
"demo_pkg",
&_DemoStatus_message_typesupport_ids.typesupport_identifier[0],
&_DemoStatus_message_typesupport_symbol_names.symbol_name[0],
&_DemoStatus_message_typesupport_data.data[0],
};
static const rosidl_message_type_support_t _DemoStatus_message_type_support_handle = {
rosidl_typesupport_c__typesupport_identifier,
reinterpret_cast<const type_support_map_t *>(&_DemoStatus_message_typesupport_map),
rosidl_typesupport_c__get_message_typesupport_handle_function,
...
};
Type Erasure IV — ROS 2 Messages walks the full dlopen / dlsym chain.
Library loading chain
Python imports:
demo_pkg_s__rosidl_typesupport_c.so— Python extension wrapper (Layer 3)
Links to at compile time:
libdemo_pkg__rosidl_generator_py.so— conversion library (convert_from_py,convert_to_py)libdemo_pkg__rosidl_typesupport_c.so— dispatcher library
Dispatcher dynamically loads at runtime:
libdemo_pkg__rosidl_typesupport_fastrtps_c.so— FastDDS serializationlibdemo_pkg__rosidl_typesupport_introspection_c.so— introspection
Key insight: Python only imports the dispatcher binding. The dispatcher (C code) handles loading of actual serialization libraries at runtime.
Why all three binding source files are identical
The three Python binding source files differ only in PyInit_* function name:
_demo_pkg_s.ep.rosidl_typesupport_c.c_demo_pkg_s.ep.rosidl_typesupport_fastrtps_c.c_demo_pkg_s.ep.rosidl_typesupport_introspection_c.c
Why identical? All generated from the same template; same capsule-registration functionality is needed regardless of which typesupport library supplies the type_support_* pointer.
The magic at CMake compile time:
foreach(_typesupport_impl IN ITEMS
rosidl_typesupport_c
rosidl_typesupport_fastrtps_c
rosidl_typesupport_introspection_c)
target_link_libraries(${target_name}
${target_name_lib} # lib*_rosidl_generator_py.so
Python3::Python # libpython
${PROJECT_NAME}__${_typesupport_impl}) # KEY: different C library
endforeach()
Each Python binding links to its typesupport C library and the dispatcher (__rosidl_typesupport_c) per Jazzy’s target_link_libraries. The linker resolves ROSIDL_GET_MSG_TYPE_SUPPORT based on the linked libraries.
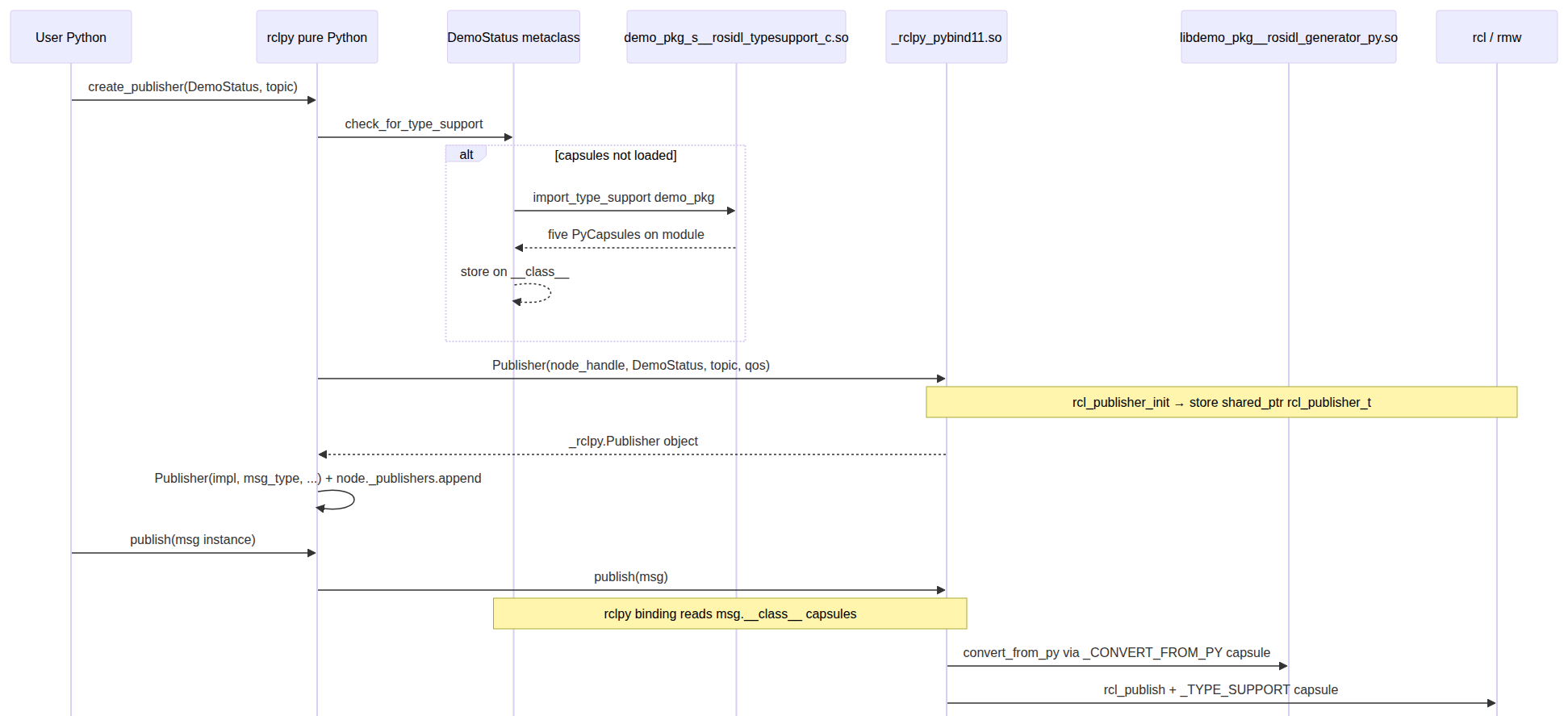
10.6 Two bindings cooperating: demo_pkg + rclpy
Publishing a message touches two independent Python binding stacks. They are built separately, loaded separately, and meet only through PyCapsule handles on the message class:
| Binding | Package | Purpose | Python side | Native side |
|---|---|---|---|---|
| Message binding | demo_pkg (per interface package) |
DemoStatus wire format: field marshalling, typesupport capsules |
_demo_status.py, metaclass __import_type_support__ |
demo_pkg_s__rosidl_typesupport_c.so → libdemo_pkg__rosidl_generator_py.so, dispatcher .so |
| Client library binding | rclpy (single install) |
ROS node API: publishers, rcl_publish, QoS |
node.py, publisher.py, type_support.py |
_rclpy_pybind11.cpython-312-aarch64-linux-gnu.so → rcl / rmw |
rclpy does not embed message conversion logic. It calls into the message binding at publish time by reading capsules that demo_pkg registered on DemoStatus.__class__.
Architecture: Python world vs C/C++ world
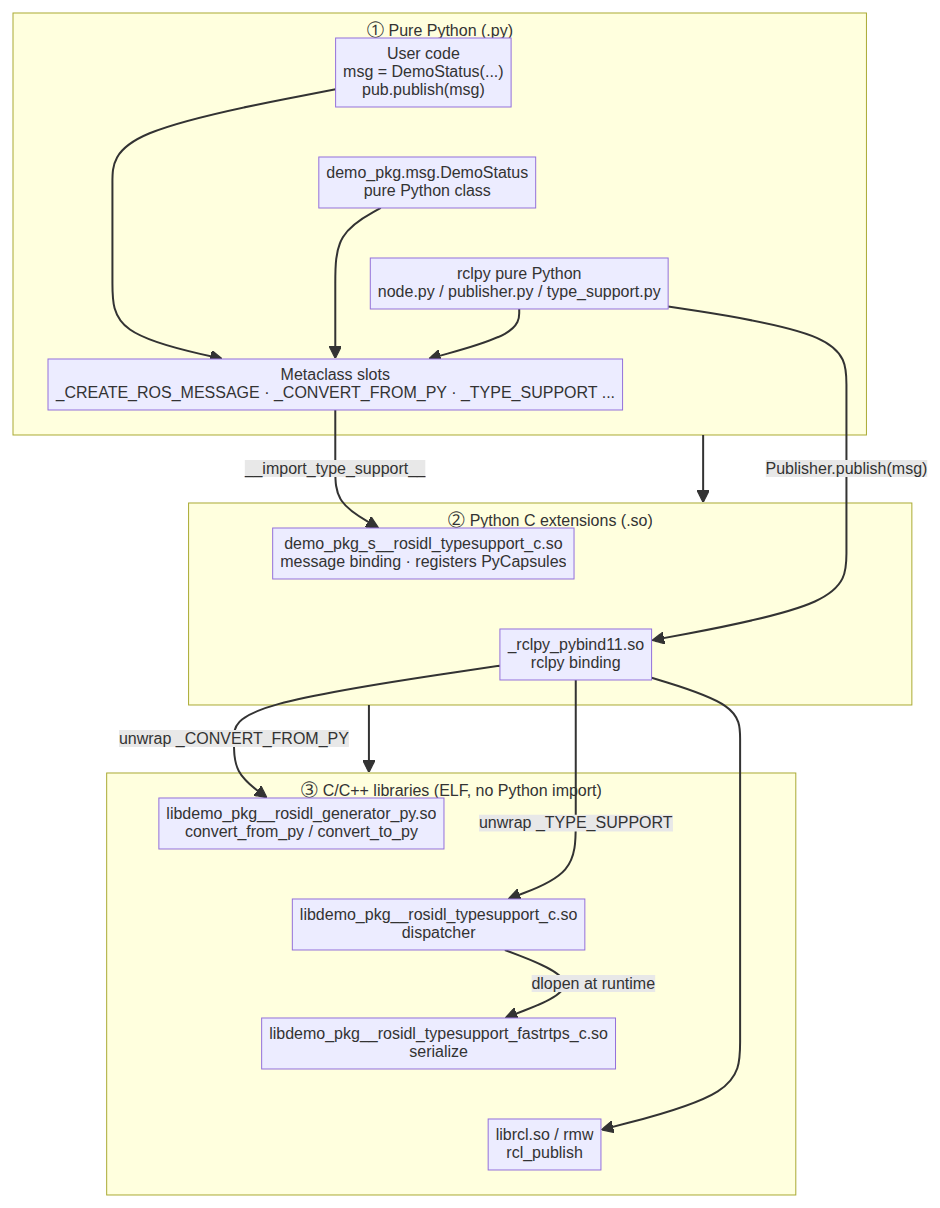
Each numbered band is a strict top-to-bottom tier: pure Python at the top, Python C extensions in the middle, native C/C++ libraries at the bottom. Cross-tier arrows only point downward; capsule registration is noted on the message-binding module instead of drawing an upward edge back to the metaclass.
Publish flow (where the two bindings meet)
10.7 Runnable verification
verify_bindings.py checks twenty claims against the Jazzy-built workspace:
- Layer 2
.sounderlib/has nocpython-*suffix; Layer 3 installs three plain.sowrappers underlib/python3.12/site-packages/demo_pkg/ - Pure Python instance construction with
_TYPE_SUPPORT is None import_type_supportloads onlydemo_pkg_s__rosidl_typesupport_c.so__import_type_support__fills fivePyCapsuleslots on the metaclass- Generated C source contains
PyModuleDef, register function, andPyInit_demo_pkg_s__rosidl_typesupport_c - Dispatcher source contains
type_support_map_tand the runtime resolver nm -Don the wrapper shows dispatcher andPyInitsymbolsrclpypublisher end-to-end publish succeeds
source /opt/ros/jazzy/setup.zsh
source install/setup.zsh
python3 verify_bindings.py
Expected: 20 passed, 0 failed.
10.8 Jazzy artifact reference
Quick lookup for the names used throughout this article (from ros2_binding_demo built on Jazzy, Python 3.12, aarch64):
| Role | Path or symbol |
|---|---|
| Layer 1 pure Python | install/.../site-packages/demo_pkg/msg/_demo_status.py |
| Layer 2 conversion lib | install/demo_pkg/lib/libdemo_pkg__rosidl_generator_py.so |
| Layer 3 extension (used) | install/.../site-packages/demo_pkg/demo_pkg_s__rosidl_typesupport_c.so |
| Layer 3 extensions (unused) | demo_pkg_s__rosidl_typesupport_fastrtps_c.so, ..._introspection_c.so |
| Dispatcher lib | install/demo_pkg/lib/libdemo_pkg__rosidl_typesupport_c.so |
| Generated C source | build/demo_pkg/rosidl_generator_py/demo_pkg/_demo_pkg_s.ep.rosidl_typesupport_c.c |
PyInit symbol |
PyInit_demo_pkg_s__rosidl_typesupport_c |
| Import path | demo_pkg.demo_pkg_s__rosidl_typesupport_c |
PyModuleDef name |
_demo_pkg_support |
rclpy C extension |
_rclpy_pybind11.cpython-312-aarch64-linux-gnu.so |
| Build interpreter SOABI | cpython-312-aarch64-linux-gnu (from sysconfig; not in rosidl Layer-3 filename) |
Python extension suffix search order on the build interpreter:
importlib.machinery.EXTENSION_SUFFIXES
# ['.cpython-312-aarch64-linux-gnu.so', '.abi3.so', '.so']
rosidl_generator_py typesupport modules install as plain .so under lib/python3.12/site-packages/; Python loads them via the .so fallback entry. rclpy’s pybind11 module uses the tagged cpython-312-aarch64-linux-gnu suffix. Both are compiled against the same system Python — the difference is filename convention only. For how pybind11 builds such modules internally, see Part VII — pybind11. For where this stack sits in the extension-vs-binding map, see Part VIII — Extensions vs Bindings §12.5.